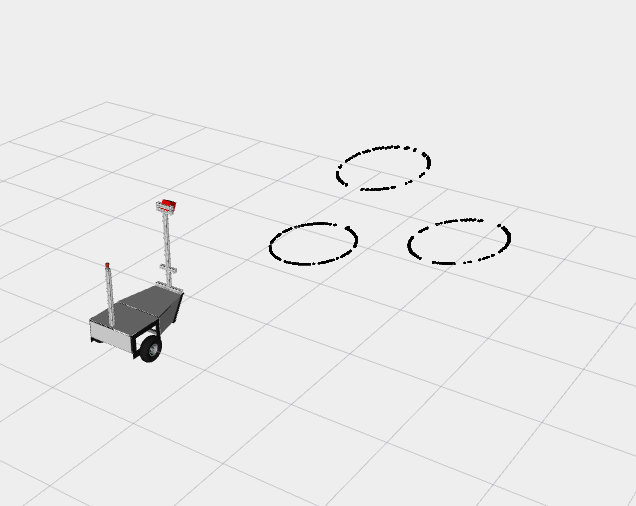
Gazebo simulation of a pothole detecting remote controlled robot
Screencast.from.08-07-2022.05.56.50.PM.webm
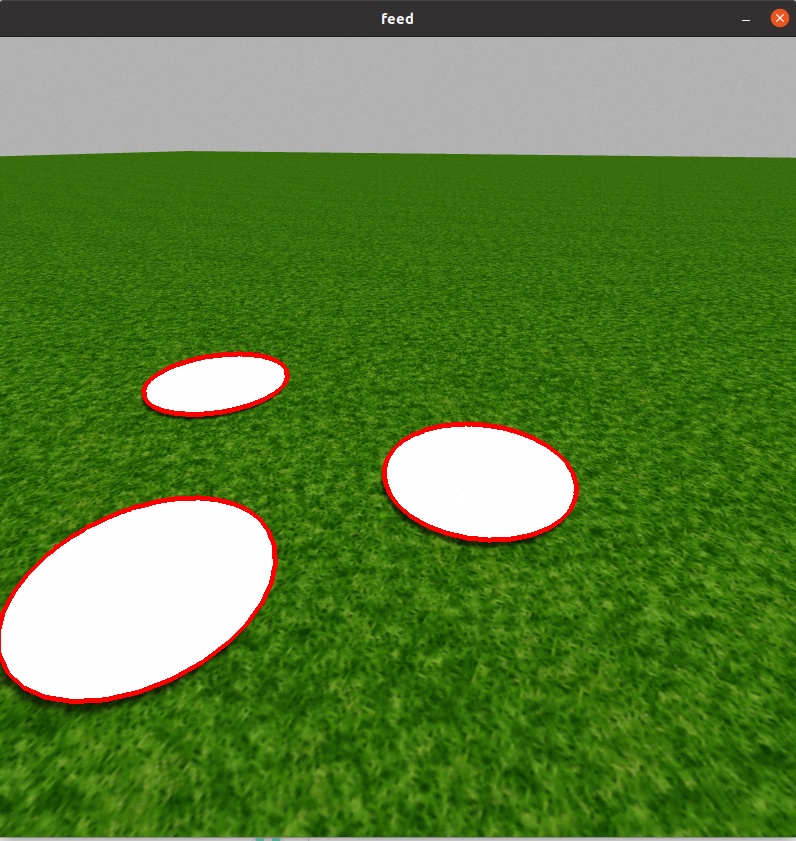
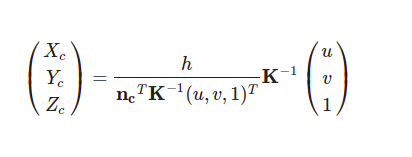
The pixels generated from the contours are converted to ground frame distances wrt to the camera using inverse perspective mapping (this formula is used):
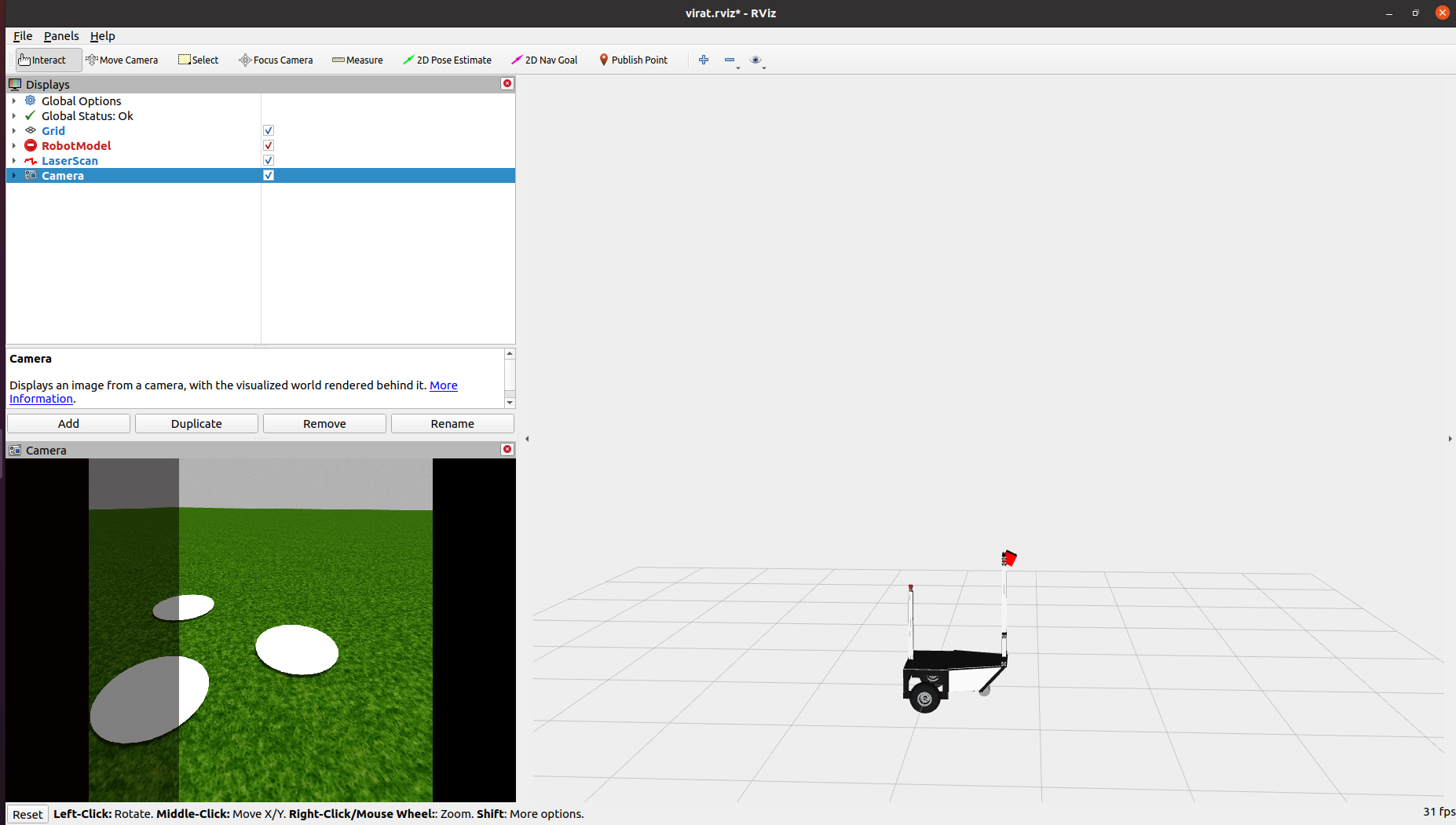
The rviz map we get:
Screencast.from.08-07-2022.11.49.20.PM.webm
Move Base is a package in ROS that provides a 2D navigation system for robots. It is designed to allow a robot to navigate autonomously in a given environment while avoiding obstacles and reaching a target location.
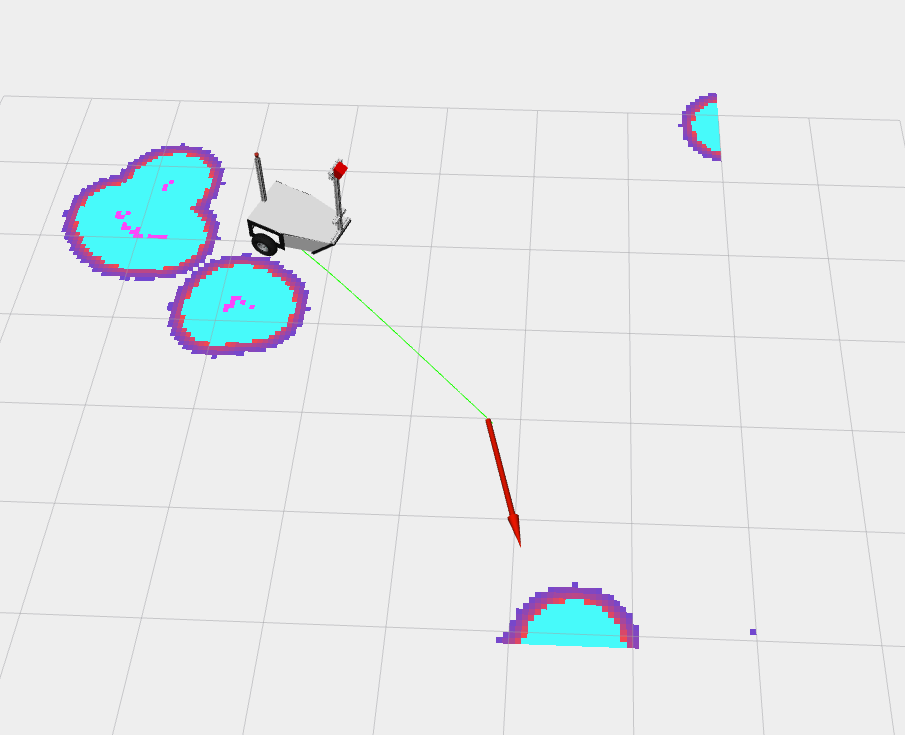
The red arrow is the given goal pose, the green line is the path generated by move base. The obstacles detected have an inflated cost of traversal as indicated by the blue costmaps