This repository is python code of "Digital Image Processing, Rafael C.Gonzalez, 3rd edition" Chapter 3 & 4
-
Spatial domain filtering
-
2D Convolution
def Spatial_convolution(img, filter): m, n = filter.shape if (m == n): y, x = img.shape #y = y - m + 1 #x = x - m + 1 zp = int((m - 1) / 2) result = np.zeros((y, x)) image_zero_padding = np.zeros((y+n-1,x+m-1)) for i in range(y): for j in range(x): image_zero_padding[i+zp][j+zp] = img[i][j] for i in range(y): for j in range(x): result[i][j] = np.sum(image_zero_padding[i:i+m,j:j+n] * filter) if result[i][j] <0: result[i][j] = 0 result = np.array(result,dtype=np.uint8) return result
-
Spatial filtering
-
Box filter (Smoothing linear filter)
- Original image
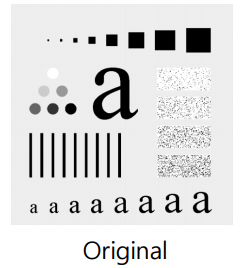
- Low pass filter
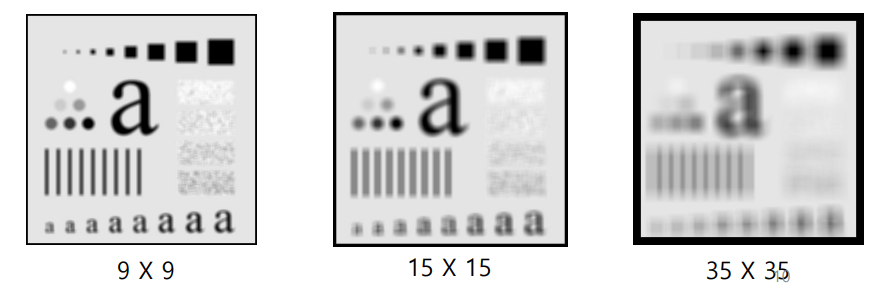
def S_smoothing_linear(img,c): smoothing_filter = np.ones((c,c))*(1/c**2) result = Spatial_convolution(img,smoothing_filter).astype(np.uint8) return result def S_weighted_average(img): weighted_filter = np.array([[1,2,1],[2,4,2],[1,2,1]])*(1/16) result = Spatial_convolution(img,weighted_filter) result = np.array(result,dtype=np.uint8) return result def S_Hpf(img,c): identity = np.zeros((c,c)) center = int((c-1)/2) identity[center][center] = 1 high_pass_filter = identity - np.ones((c,c))*(1/c**2) result = Spatial_convolution(img, high_pass_filter) result1 = np.array(result,dtype=np.uint8) result = logtransformation(result1) return result
-
-
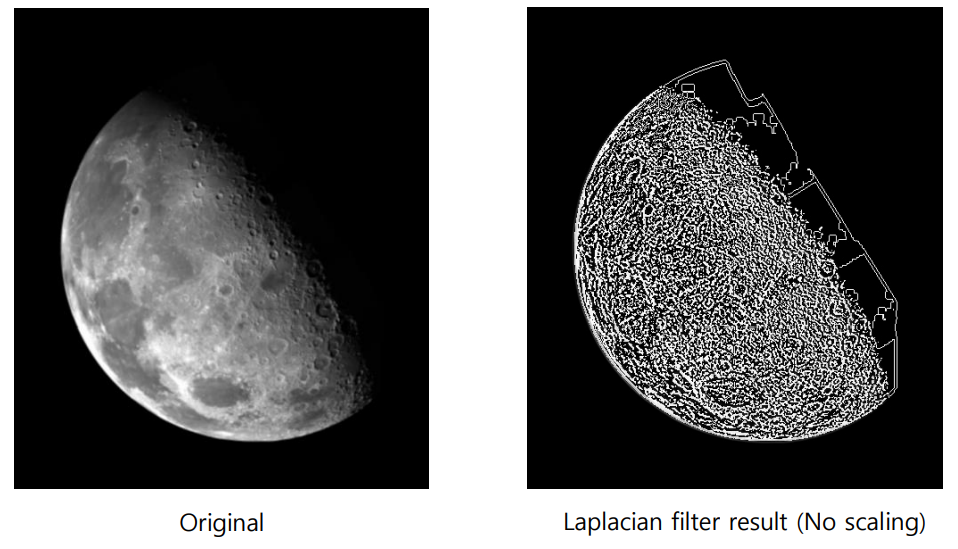
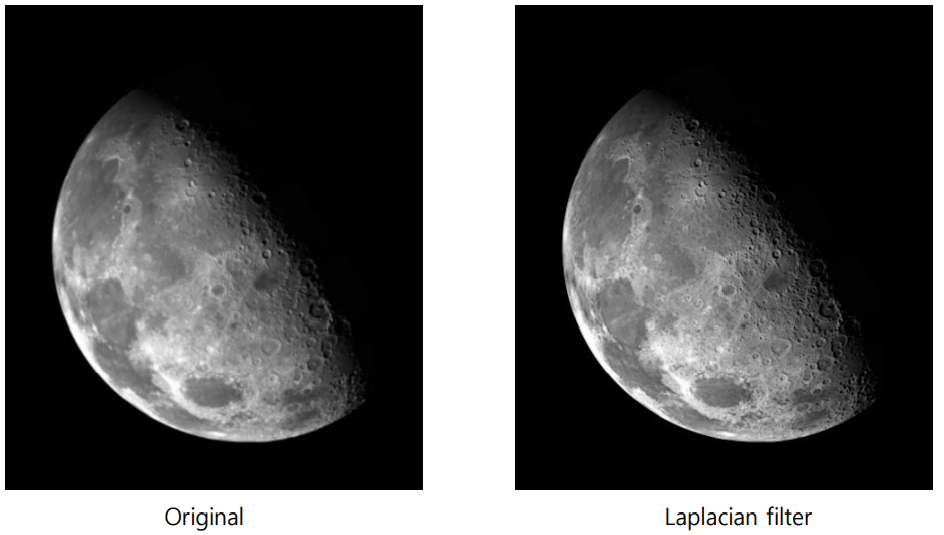
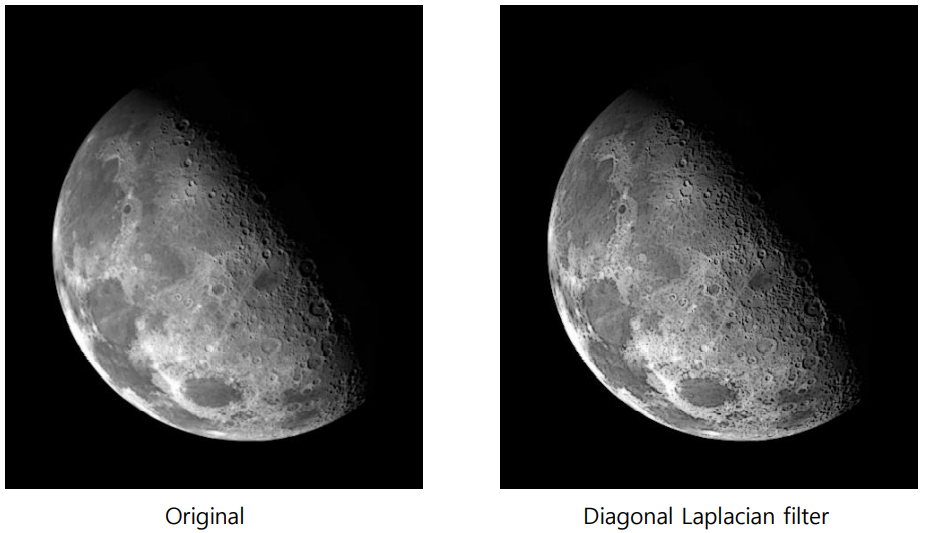
Laplacian filter
-
Before Normalizing
-
After Nomalizing
-
Sharpening with normal laplacian filter
-
Sharpening with diagonal laplacian filter
-
Comparison between normal & diagonal laplacian filter
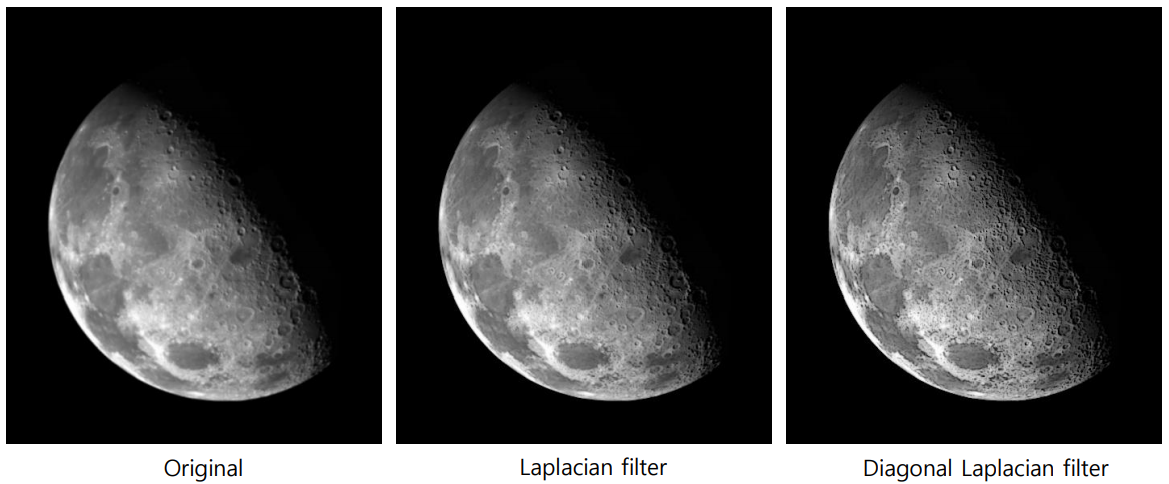
def S_Laplacian_filter(img): laplacian = np.array([[0,1,0],[1,-4,1],[0,1,0]]) laplacian_diagonal = np.array([[1,1,1],[1,-8,1],[1,1,1]]) result = Spatial_convolution(img,laplacian_diagonal) return result
-
-
Sobel operator
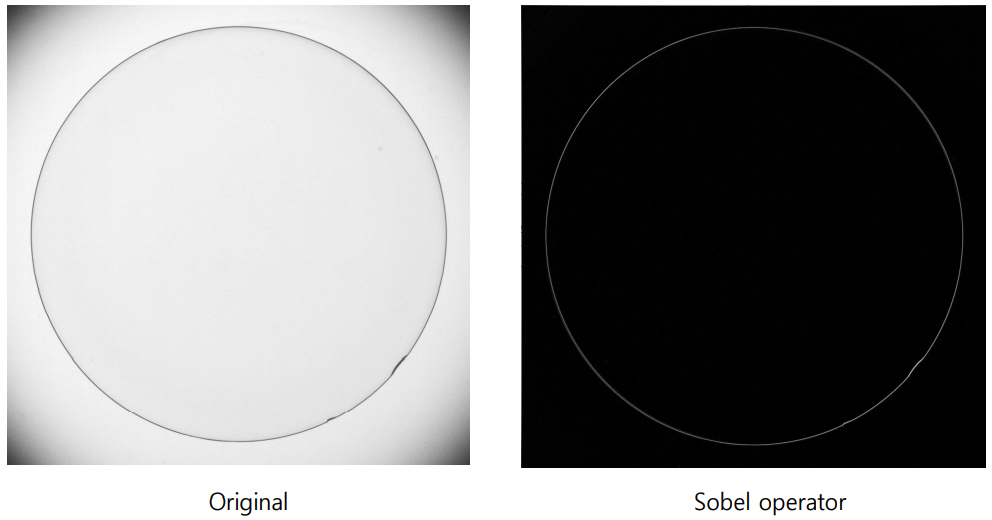
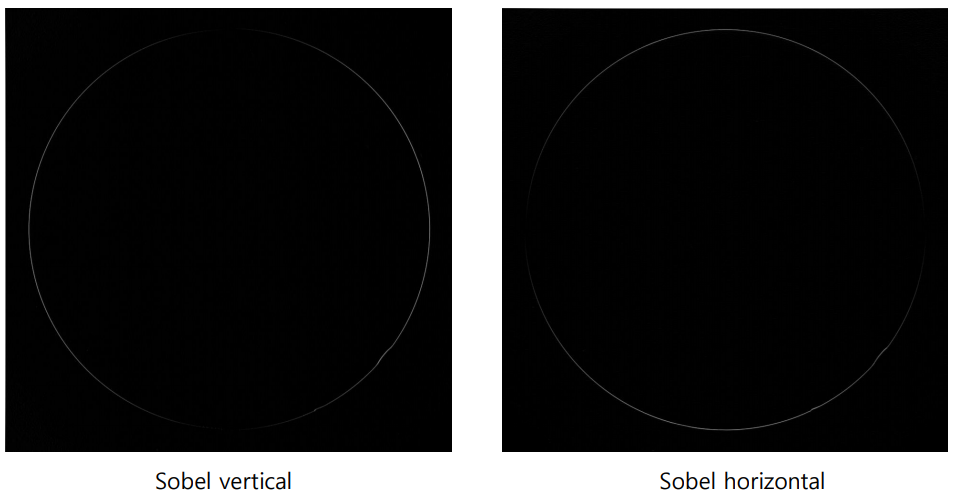
def S_Sobel_horizontal(img): sobel_h = np.array([[-1,-2,-1],[0,0,0],[1,2,1]]) result = Spatial_convolution(img,sobel_h) min = np.amin(result) result = result -min max = np.amax(result) result = (255 / max) * result result = np.array(result, dtype=np.uint8) return result def S_Sobel_vertical(img): sobel_v = np.array([[-1,0,1],[-2,0,2],[-1,0,1]]) result = Spatial_convolution(img,sobel_v) min = np.amin(result) result = result -min max = np.amax(result) result = (255 / max) * result result = np.array(result, dtype=np.uint8) return result
-
Unsharp masking and highboost filtering
- Unsharp masking
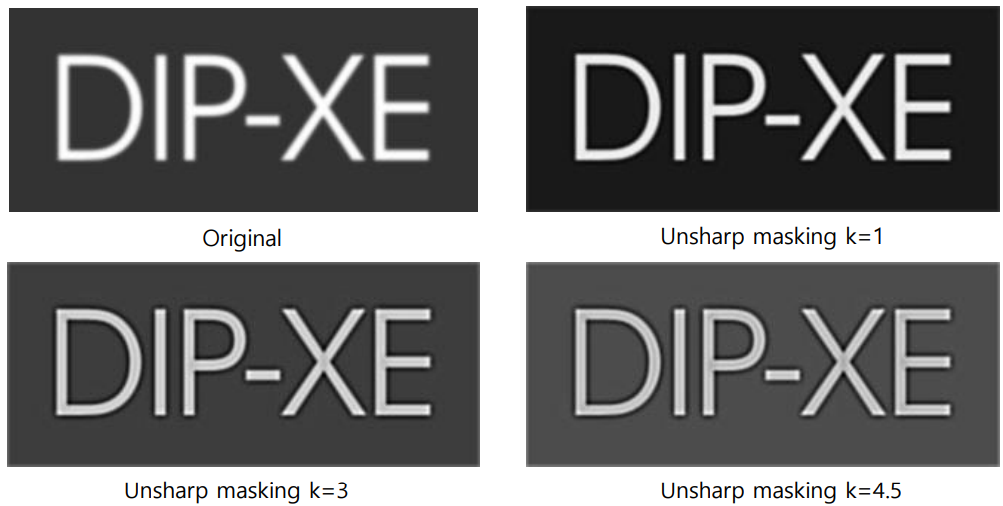
def S_Unsharp_masking(img,c,a,k): a,b = img.shape #hpf_image = S_Hpf(img,c) lpf_image = S_Gaussian_LPF(img,c,a) mask_image = np.empty_like(img) mask_image = np.array(mask_image,dtype=float) img = np.array(img,dtype=float) lpf_image = np.array(lpf_image,dtype=float) for i in range(a): for j in range(b): mask_image[i][j] = img[i][j] - lpf_image[i][j] result = np.empty_like(img) result = np.array(result, dtype=float) for i in range(a): for j in range(b): result[i][j] = img[i][j] + k*mask_image[i][j] min = np.amin(result) result = result - min max = np.amax(result) result = (255 / max) * result result = np.array(result, dtype=np.uint8) return result
- High boost by Unsharpmasking + Sobel filter
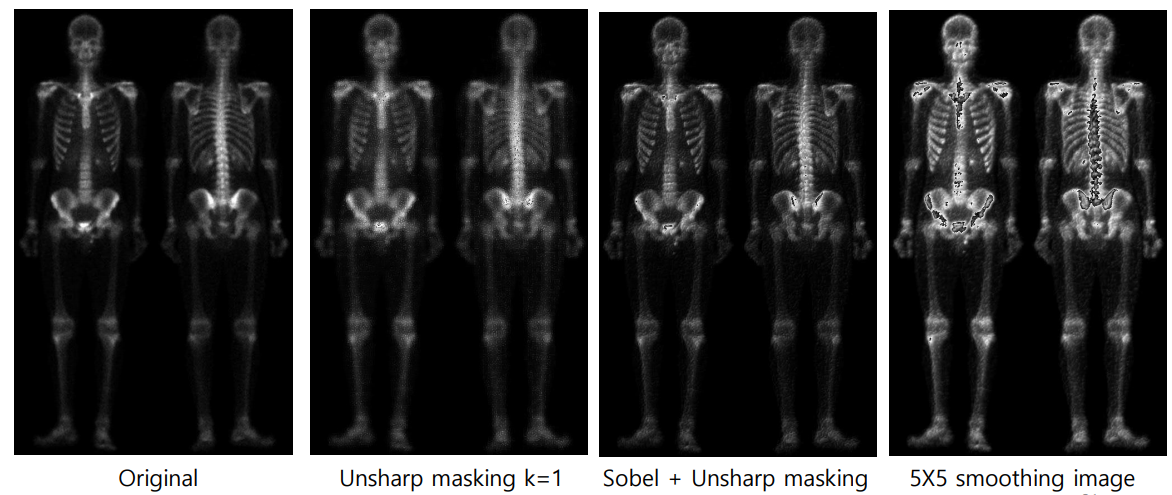
- Unsharp masking
-
-
Frequency domain filtering
def Fourier_transform(img): FT_transformed = np.fft.fft2(img) fft_shift = np.fft.fftshift(FT_transformed) fft_shift = np.asarray(fft_shift) magnitude_spectrum = 20*np.log(np.abs(fft_shift))/np.log(5) magnitude_spectrum = np.asarray(magnitude_spectrum,dtype=np.uint8) return magnitude_spectrum
-
Ideal low&high-pass filter
- Low pass filter
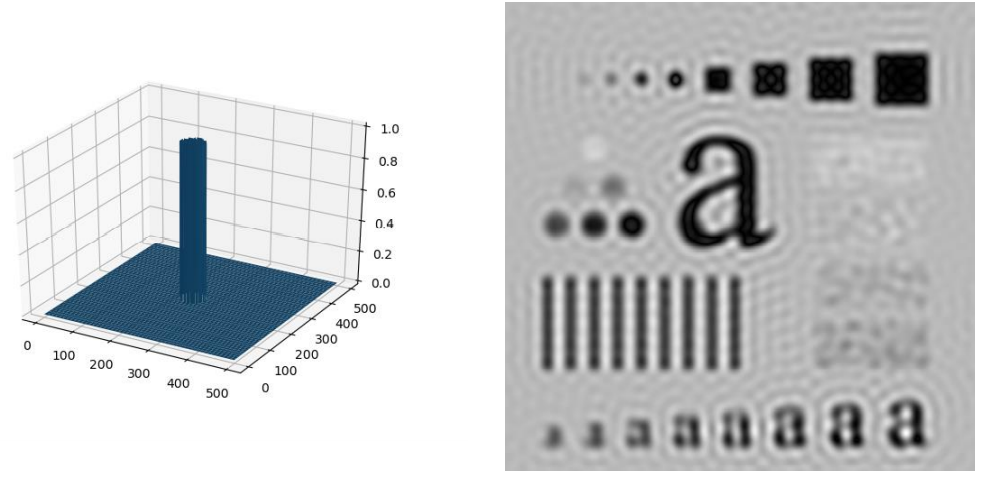
def F_LPF_round(img,d): Lowpassfilter = np.zeros_like(img) a,b = Lowpassfilter.shape for x in range(0,b): for y in range(0,a): if int(sqrt((x-b/2)**2 + (y-a/2)**2)) <= d: Lowpassfilter[y,x] = 1 Lowpassfilter = np.array(Lowpassfilter,dtype= float) img = Fourier_transform(img) result = img * Lowpassfilter result1 = np.fft.ifft2(result) result2 = np.absolute(result1) max = np.amax(result2) result3 = (255 / max) * result2 result4 = np.array(result3, dtype=np.uint8) # xx = np.linspace(0,img.shape[1]-1,img.shape[1]) # yy = np.linspace(0,img.shape[0]-1,img.shape[0]) # # xxx,yyy =np.meshgrid(xx,yy) # fig = plt.figure() # ax = plt.axes(projection ='3d') # ax.plot_surface(yyy,xxx,Lowpassfilter) # plt.show() return result4 def F_LPF_square(img,c): Lowpassfilter = np.zeros_like(img) a,b = Lowpassfilter.shape if (a%2) == 0: if (b%2) == 0: Lowpassfilter[int(b/2)-c:int(b/2)+1+c,int(a/2)-c:int(a/2)+1+c] = 1 elif (b%2) == 1: Lowpassfilter[int((b-1)/2)-c:int((b-1)/2)+2+c, int(a/2)-c:int(a/2)+1+c] = 1 elif (a%2) == 1: if (b%2) == 0: Lowpassfilter[int(b/2)-c:int(b/2)+1+c,int((a-1)/2)-c:int((a-1)/2)+2+c]=1 elif (b%2) ==1: Lowpassfilter[int((b-1)/2)-c:int((b-1)/2)+2+c,int((a-1)/2)-c:int((a-1)/2)+2+c] = 1 Lowpassfilter = np.array(Lowpassfilter,dtype=float) img = Fourier_transform(img) result = img*Lowpassfilter result1 = np.fft.ifft2(result) result2 = np.absolute(result1) max = np.amax(result2) result3 = (255/max)*result2 result4 = np.array(result3,dtype=np.uint8) return result4
- High pass filter

def F_HPF_round(img,d): Highpassfilter = np.ones_like(img) a,b = Highpassfilter.shape for x in range(0,b): for y in range(0,a): if int(sqrt((x-b/2)**2 + (y-a/2)**2)) <= d: Highpassfilter[y,x] = 0 Highpassfilter = np.array(Highpassfilter,dtype= float) img = Fourier_transform(img) result = img * Highpassfilter result1 = np.fft.ifft2(result) result2 = np.absolute(result1) max = np.amax(result2) result3 = (255 / max) * result2 result4 = np.array(result3, dtype=np.uint8) return result4 def F_HPF_square(img,c): Highpassfilter = np.ones_like(img) a, b = Highpassfilter.shape if (a % 2) == 0: if (b % 2) == 0: Highpassfilter[int(b / 2) - c:int(b / 2) + 1 + c, int(a / 2) - c:int(a / 2) + 1 + c] = 0 elif (b % 2) == 1: Highpassfilter[int((b - 1) / 2) - c:int((b - 1) / 2) + 2 + c, int(a / 2) - c:int(a / 2) + 1 + c] = 0 elif (a % 2) == 1: if (b % 2) == 0: Highpassfilter[int(b / 2) - c:int(b / 2) + 1 + c, int((a - 1) / 2) - c:int((a - 1) / 2) + 2 + c] = 0 elif (b % 2) == 1: Highpassfilter[int((b - 1) / 2) - c:int((b - 1) / 2) + 2 + c, int((a - 1) / 2) - c:int((a - 1) / 2) + 2 + c] = 0 Highpassfilter = np.array(Highpassfilter, dtype=float) img = Fourier_transform(img) result = img * Highpassfilter result1 = np.fft.ifft2(result) result2 = np.absolute(result1) max = np.amax(result2) result3 = (255 / max) * result2 result4 = np.array(result3, dtype=np.uint8) return result4
- Low pass filter
-
Gaussian low&high-pass filter
- Low pass filter
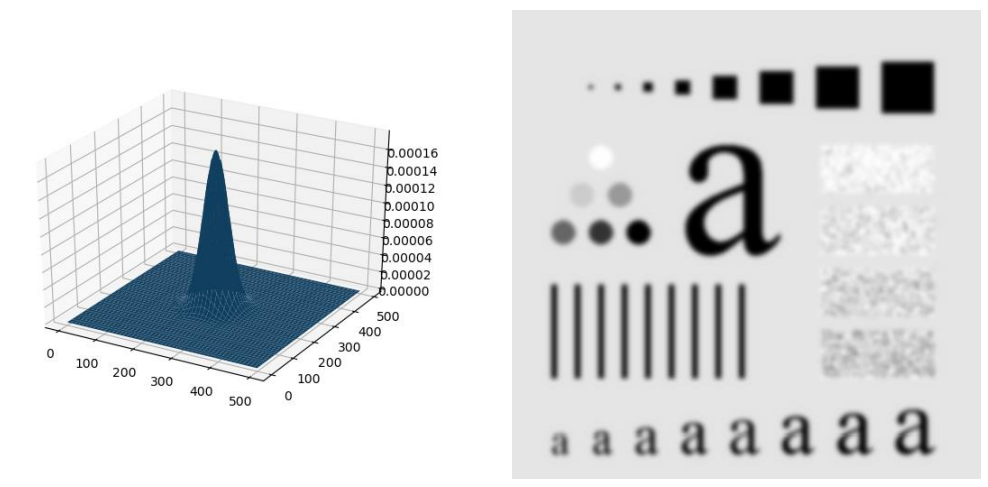
def F_Gaussian_LPF(img,sigma): a,b = img.shape Gaussian_height = [exp(-(z-int(a/2))*(z-int(a/2)) / (2 * sigma * sigma)) for z in range(0, a)] Gaussian_width = [exp(-(z-int(b/2))*(z-int(b/2)) / (2 * sigma * sigma)) for z in range(0, b)] Gaussian_filter = np.outer(Gaussian_height, Gaussian_width) Gaussian_filter = np.array(Gaussian_filter,dtype=np.float)/Gaussian_filter.sum(dtype=np.float) img = Fourier_transform(img) result = img*Gaussian_filter result1 = np.fft.ifft2(result) result2 = np.absolute(result1) max = np.amax(result2) result3 = (255/max)*result2 result4 = np.array(result3,dtype=np.uint8) # print(img.shape) # xx = np.linspace(0,img.shape[1]-1,img.shape[1]) # yy = np.linspace(0,img.shape[0]-1,img.shape[0]) # # xxx,yyy =np.meshgrid(xx,yy) # fig = plt.figure() # ax = plt.axes(projection ='3d') # ax.plot_surface(yyy,xxx,Gaussian_filter) #plt.show() return result4
- High pass filter

def F_Gaussian_HPF(img,sigma): from numpy import pi, exp, sqrt a, b = img.shape Gaussian_height = [(exp(-(z-int(a/2))*(z-int(a/2))/(2*sigma*sigma))) for z in range(0, a)] Gaussian_width = [(exp(-(z-int(b/2))*(z-int(b/2))/(2*sigma*sigma))) for z in range(0, b)] Gaussian_filter = np.outer(Gaussian_height, Gaussian_width) Gaussian_filter = np.array(Gaussian_filter, dtype=np.float) Gaussian_filter = np.array(1-Gaussian_filter,dtype=np.float) img = Fourier_transform(img) result = img * (Gaussian_filter) result1 = np.fft.ifft2(result) result2 = np.absolute(result1) max = np.amax(result2) result3 = (255 / max) * result2 result4 = np.array(result3, dtype=np.uint8) # print(img.shape) # # xx = np.linspace(0,img.shape[1]-1,img.shape[1]) # yy = np.linspace(0,img.shape[0]-1,img.shape[0]) # # xxx,yyy =np.meshgrid(xx,yy) # fig = plt.figure() # ax = plt.axes(projection ='3d') # ax.plot_surface(yyy,xxx,Gaussian_filter) # plt.show() return result4
- Low pass filter
-
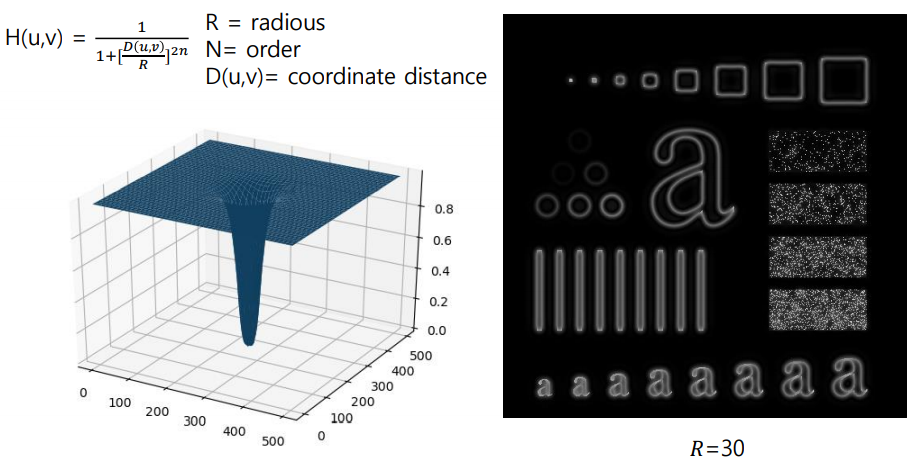
Butterworth low&high-pass filter
-
Low pass filter
def Butterworth_LPF(img,d,order): Lowpassfilter = np.zeros_like(img) Lowpassfilter = np.array(Lowpassfilter,dtype=float) a,b = Lowpassfilter.shape for x in range(0,b): for y in range(0,a): distance = sqrt((x-b/2)**2 + (y-a/2)**2) Lowpassfilter[y,x] = 1/(1+(distance/d)**(2*order)) img = Fourier_transform(img) result = img * Lowpassfilter result1 = np.fft.ifft2(result) result2 = np.absolute(result1) max = np.amax(result2) result3 = (255 / max) * result2 result4 = np.array(result3, dtype=np.uint8) # xx = np.linspace(0,img.shape[1]-1,img.shape[1]) # yy = np.linspace(0,img.shape[0]-1,img.shape[0]) # # xxx,yyy =np.meshgrid(xx,yy) # fig = plt.figure() # ax = plt.axes(projection ='3d') # ax.plot_surface(yyy,xxx,Lowpassfilter) # plt.show() return result4
- High pass filter
def Butterworth_HPF(img,d,order): Highpassfilter = np.zeros_like(img) Highpassfilter = np.array(Highpassfilter,dtype=float) a,b = Highpassfilter.shape for x in range(0,b): for y in range(0,a): distance = sqrt((x-b/2)**2+(y-a/2)**2) if distance==0 : Highpassfilter[y,x] = 0 else : Highpassfilter[y,x] = 1/(1+(d/distance)**(2*order)) img = Fourier_transform(img) result = img * Highpassfilter result1 = np.fft.ifft2(result) result2 = np.absolute(result1) max = np.amax(result2) result3 = (255 / max) * result2 result4 = np.array(result3, dtype=np.uint8) # print(img.shape) # xx = np.linspace(0,img.shape[1]-1,img.shape[1]) # yy = np.linspace(0,img.shape[0]-1,img.shape[0]) # # xxx,yyy =np.meshgrid(xx,yy) # fig = plt.figure() # ax = plt.axes(projection ='3d') # ax.plot_surface(yyy,xxx,Highpassfilter) # plt.show() return result4
-
Notch filter
- Frequency components of original image & Required notch filter

- Filtered image

- Noise of the image ( Extracted by Inverse notch filter)

def Notch_round_filter(img,d): a, b = img.shape Notchfilter = np.ones_like(img) for x in range(0,b): for y in range(0,a): if (sqrt((x-111)**2 + (y-81)**2)) <= d or (sqrt((x-55)**2 + (y-85)**2)) <= d or (sqrt((x-57)**2 + (y-165)**2)) <= d or (sqrt((x-113)**2 + (y-161)**2)) <= d or (sqrt((x-55)**2 + (y-44)**2)) <= d or (sqrt((x-111)**2 + (y-40)**2)) <= d or (sqrt((x-57)**2 + (y-206)**2)) <= d or(sqrt((x-113)**2 + (y-202)**2)) <= d : Notchfilter[y,x] = 0 Notchfilter = np.array(Notchfilter,dtype= float) img = Fourier_transform(img) result = img * Notchfilter result1 = np.fft.ifft2(result) result2 = np.absolute(result1) max = np.amax(result2) result3 = (255 / max) * result2 result4 = np.array(result3, dtype=np.uint8) # xx = np.linspace(0,img.shape[1]-1,img.shape[1]) # yy = np.linspace(0,img.shape[0]-1,img.shape[0]) # # xxx,yyy =np.meshgrid(xx,yy) # fig = plt.figure() # ax = plt.axes(projection ='3d') # ax.plot_surface(yyy,xxx,Notchfilter) # plt.show() return result4
- Frequency components of original image & Required notch filter
-
-
Restoration
- Noise Function
def Bluring_Noise(img,k): Noisefilter = np.zeros_like(img) Noisefilter = np.array(Noisefilter, dtype=float) a, b = Noisefilter.shape for x in range(0, b): for y in range(0, a): Noisefilter[y, x] = exp((-1)*k*((y-b/2)**2 +(x-a/2)**2)**(5/6)) img = Fourier_transform(img) result = img * Noisefilter result1 = np.fft.ifft2(result) result2 = np.absolute(result1).astype(np.uint8) return result2
- Spatial domain restoration
- Median filter
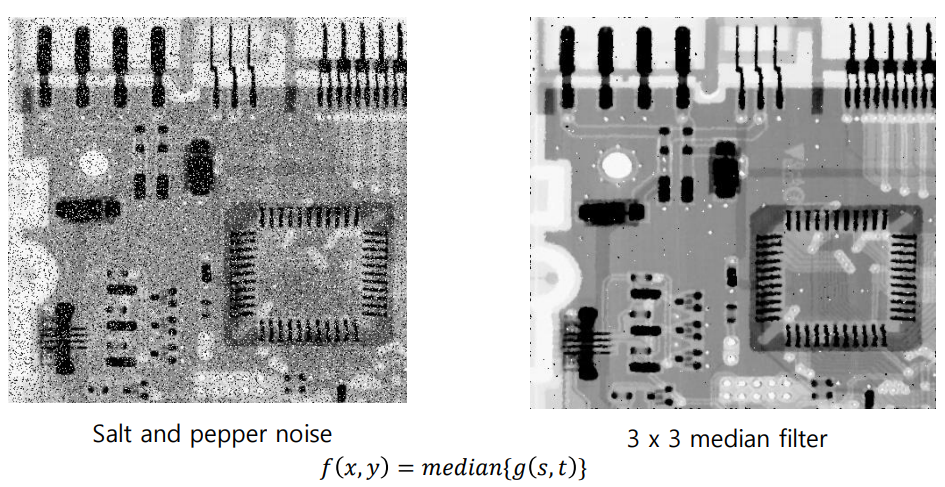
def Median_filter(img,c): zp = int((c-1)/2) y, x = img.shape image_zero_padding = np.zeros((y + c- 1, x + c - 1)) for i in range(y): for j in range(x): image_zero_padding[i+zp][j+zp] = img[i][j] image_zero_padding = np.array(image_zero_padding, dtype=np.uint8) filter = np.zeros((c, c)) result = np.zeros((y, x)) for i in range(y): for j in range(x): filter = image_zero_padding[i :i+2*zp+1, j:j+2*zp+1] result[i][j] = np.median(filter) result = np.array(result, dtype=np.uint8) return result
- Min-max filter
- Min filter
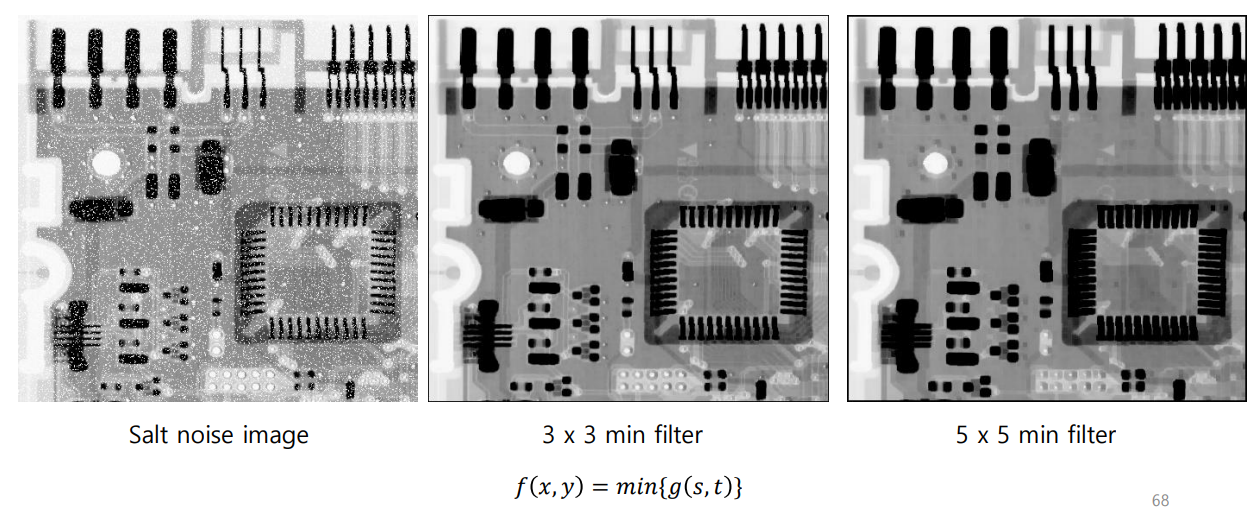
def Min_filter(img,c): zp = int((c-1)/2) y, x = img.shape image_zero_padding = np.zeros((y + c- 1, x + c - 1)) for i in range(y): for j in range(x): image_zero_padding[i+zp][j+zp] = img[i][j] image_zero_padding = np.array(image_zero_padding, dtype=np.uint8) filter = np.zeros((c, c)) result = np.zeros((y, x)) for i in range(y): for j in range(x): filter = image_zero_padding[i :i+2*zp+1, j:j+2*zp+1] result[i][j] = np.amin(filter) result = np.array(result, dtype=np.uint8) return result
- Max filter

def Max_filter(img,c): zp = int((c-1)/2) y, x = img.shape image_zero_padding = np.zeros((y + c- 1, x + c - 1)) for i in range(y): for j in range(x): image_zero_padding[i+zp][j+zp] = img[i][j] image_zero_padding = np.array(image_zero_padding, dtype=np.uint8) filter = np.zeros((c, c)) result = np.zeros((y, x)) for i in range(y): for j in range(x): filter = image_zero_padding[i :i+2*zp+1, j:j+2*zp+1] result[i][j] = np.amax(filter) result = np.array(result, dtype=np.uint8) return result
- Min filter
- Midpoint filter

def Midpoint_filter(img,c): zp = int((c - 1) / 2) y, x = img.shape image_zero_padding = np.zeros((y + c - 1, x + c - 1)) for i in range(y): for j in range(x): image_zero_padding[i + zp][j + zp] = img[i][j] image_zero_padding = np.array(image_zero_padding, dtype=np.uint8) filter = np.zeros((c, c)) result = np.zeros((y, x)) for i in range(y): for j in range(x): filter = image_zero_padding[i:i + 2 * zp + 1, j:j + 2 * zp + 1] result[i][j] = (1/2)*np.amax(filter)+(1/2)*np.amin(filter) a= np.amax(filter) b= np.amin(filter) result = np.array(result, dtype=np.uint8) return result
- Alpha-trimmed mean filter

def Alpha_trimmed_mean_filter(img,c,a): zp = int((c - 1) / 2) y, x = img.shape image_zero_padding = np.zeros((y + c - 1, x + c - 1)) for i in range(y): for j in range(x): image_zero_padding[i + zp][j + zp] = img[i][j] image_zero_padding = np.array(image_zero_padding, dtype=np.uint8) filter = np.zeros((c, c)) result = np.zeros((y, x)) for i in range(y): for j in range(x): filter = image_zero_padding[i:i + 2 * zp + 1, j:j + 2 * zp + 1] ordered_filter = np.array(filter).reshape(c**2,) ordered_filter = np.sort(ordered_filter) ordered_trimmed_filter = ordered_filter[a:c**2-a] result[i][j]=(1/(c**2 - 2*a))*np.sum(ordered_trimmed_filter) result = np.array(result, dtype=np.uint8) return result
- Adaptive median fitler
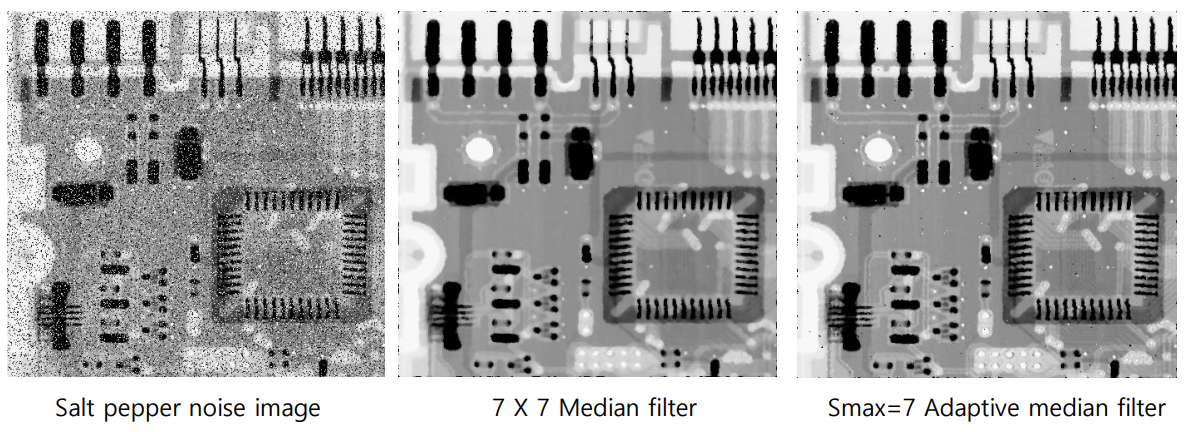
def Adaptive_median_filter(img): Smax = 7 zpm = 3 y, x = img.shape image_zero_padding = np.zeros((y + Smax - 1, x + Smax - 1)) for i in range(y): for j in range(x): image_zero_padding[i+zpm][j+zpm] = img[i][j] image_zero_padding = np.array(image_zero_padding,dtype =np.uint8) filter = np.zeros((3,3)) filter1 = np.zeros((5,5)) filter2 = np.zeros((7,7)) result = np.zeros((y, x)) for i in range(y): for j in range(x): filter = image_zero_padding[i+2:i+5,j+2:j+5] if (np.median(filter) - np.amin(filter)) > 0 and (np.median(filter) - np.amax(filter)) < 0: if image_zero_padding[i + 3][j + 3] - np.amin(filter) > 0 and image_zero_padding[i + 3][j + 3] - np.amax(filter) < 0: result[i][j] = image_zero_padding[i + 3][j + 3] else: result[i][j] = np.median(filter) else: filter1 =image_zero_padding[i+1:i+6,j+1:j+6] if (np.median(filter1)-np.amin(filter1))>0 and (np.median(filter1)-np.amax(filter1)) < 0 : if image_zero_padding[i+3][j+3] - np.amin(filter1) >0 and image_zero_padding[i+3][j+3] -np.amax(filter1) <0: result[i][j] = image_zero_padding[i+3][j+3] else : result[i][j] = np.median(filter1) else : filter2 = image_zero_padding[i:i+7,j:j+7] if (np.median(filter2) - np.amin(filter2)) > 0 and (np.median(filter2) - np.amax(filter2)) < 0: if image_zero_padding[i + 3][j + 3] - np.amin(filter2) > 0 and image_zero_padding[i + 3][j + 3] - np.amax(filter2) < 0: result[i][j] = image_zero_padding[i + 3][j + 3] else: result[i][j] = np.median(filter2) result = np.array(result,dtype=np.uint8) return result
- Median filter
- Frequency domain restoration
- Inverse filtering
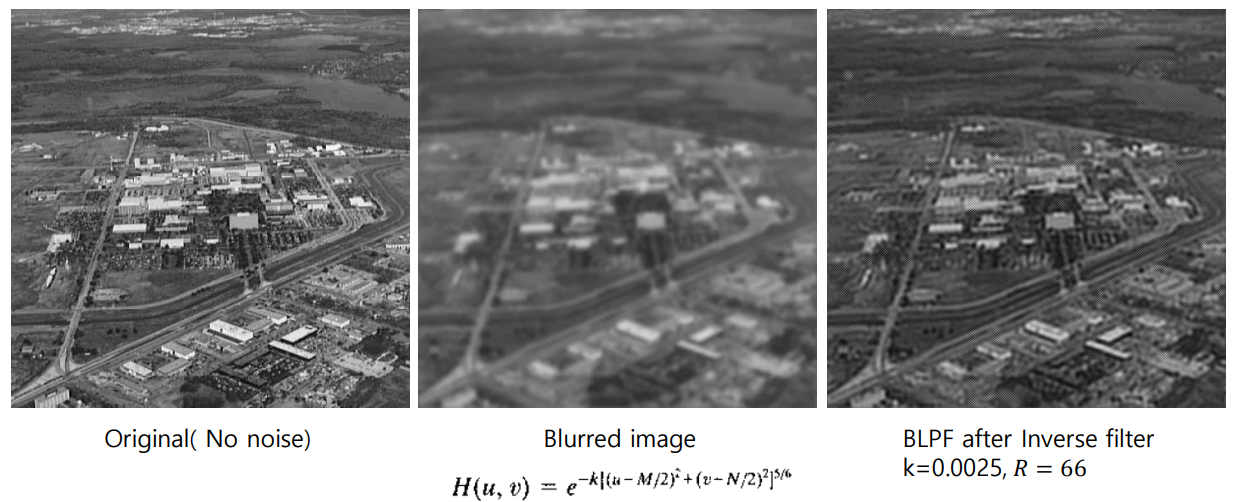
def Inverse_filter(img,k): Inverse_filter = np.zeros_like(img) Inverse_filter = np.array(Inverse_filter, dtype=float) a, b = Inverse_filter.shape for x in range(0, b): for y in range(0, a): Inverse_filter[y,x] =1 /(exp((-1)*k*((y-b/2)**2+(x-a/2)**2)**(5/6))) img = Fourier_transform(img) result = img * Inverse_filter result1 = np.fft.ifft2(result) result2 = np.absolute(result1) max = np.amax(result2) result3 = (255 / max ) * result2 result4 = np.array(result3, dtype=np.uint8) return result4 def Inverse_with_Butterworth_filter(img,k,r): Inverse_filter = np.zeros_like(img) Inverse_filter = np.array(Inverse_filter, dtype=float) a, b = Inverse_filter.shape for x in range(0, b): for y in range(0, a): Inverse_filter[y, x] =1 /(exp((-1)*k* ((y - b / 2) ** 2 + (x - a / 2) ** 2) ** (5 / 6))) Lowpassfilter = np.zeros_like(img) Lowpassfilter = np.array(Lowpassfilter,dtype=float) c,d = Lowpassfilter.shape for x in range(0,d): for y in range(0,c): distance = sqrt((x-d/2)**2 + (y-c/2)**2) Lowpassfilter[y,x] = 1/(1+(distance/r)**(2*10)) img = Fourier_transform(img) result = img * Inverse_filter * Lowpassfilter result1 = np.fft.ifft2(result) result2 = np.absolute(result1) max = np.amax(result2) result3 = (255 / max ) * result2 result4 = np.array(result3, dtype=np.uint8) return result4
- Wiener filtering
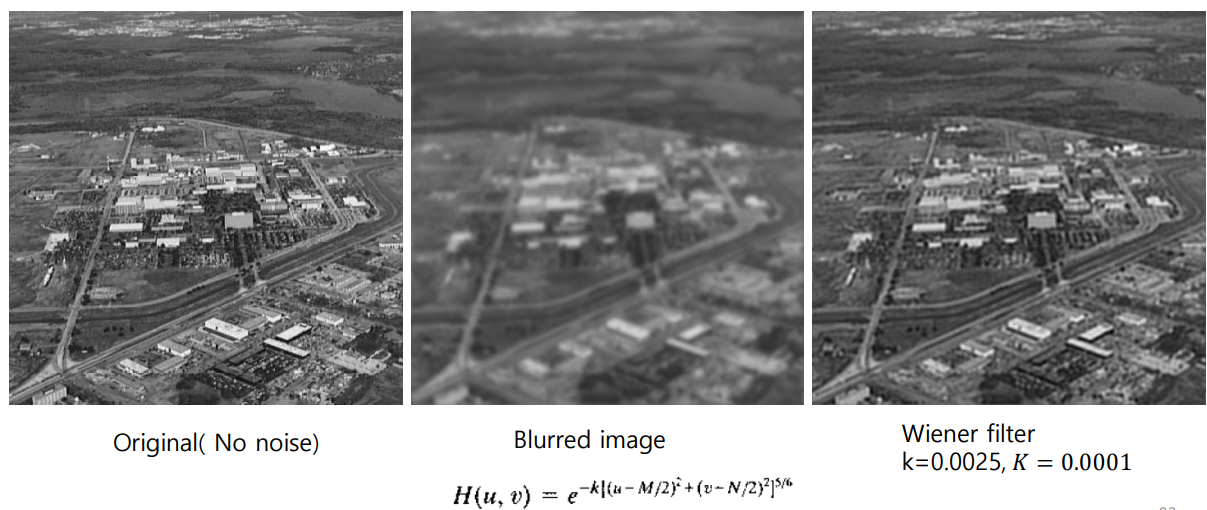
def Wiener_filter(img,k,K): Wiener_filter = np.zeros_like(img) Noise_filter = np.zeros_like(img) Noise_filter = np.array(Noise_filter, dtype=float) a, b = Noise_filter.shape for x in range(0, b): for y in range(0, a): Noise_filter[y, x] = (exp((-1)*k* ((y - b / 2) ** 2 + (x - a / 2) ** 2) ** (5 / 6))) Noise_abs = np.absolute(Noise_filter) Noise_abs_square =np.square(Noise_abs) Wiener_filter = (1/Noise_filter)*(Noise_abs_square/(Noise_abs_square+K)) img = Fourier_transform(img) result = img * Wiener_filter result1 = np.fft.ifft2(result) result2 = np.absolute(result1) max = np.amax(result2) result3 = (255 / max ) * result2 result4 = np.array(result3, dtype=np.uint8) return result4 def Wiener_with_Butterworth_filter(img,k,K,r): Wiener_filter = np.zeros_like(img) Noise_filter = np.zeros_like(img) Noise_filter = np.array(Noise_filter, dtype=float) a, b = Noise_filter.shape for x in range(0, b): for y in range(0, a): Noise_filter[y, x] = (exp((-1) * k * ((y - b / 2) ** 2 + (x - a / 2) ** 2) ** (5 / 6))) Noise_abs = np.absolute(Noise_filter) Noise_abs_square = np.square(Noise_abs) Wiener_filter = (1 / Noise_filter) * (Noise_abs_square / (Noise_abs_square + K)) Lowpassfilter = np.zeros_like(img) Lowpassfilter = np.array(Lowpassfilter,dtype=float) c,d = Lowpassfilter.shape for x in range(0,d): for y in range(0,c): distance = sqrt((x-d/2)**2 + (y-c/2)**2) Lowpassfilter[y,x] = 1/(1+(distance/r)**(2*10)) img = Fourier_transform(img) result = img * Wiener_filter * Lowpassfilter result1 = np.fft.ifft2(result) result2 = np.absolute(result1) max = np.amax(result2) result3 = (255 / max ) * result2 result4 = np.array(result3, dtype=np.uint8) return result4
- Inverse filtering
#See details in HERE