{kind=link}
Virtuaalmasin asub aadressil: http://dijkstra.cs.ttu.ee/~Gert.Kanter/iti0201/
Kui kasutate arvutiklassi arvutit, siis salvestage see .ova fail kettale D: (datadrive).
Virtuaalmasin tuleb importida VirtualBox rakendusse.
Selleks pange VirtualBox käima ja valige File menüüst Import Appliance ja valige eelnevas punktis salvestatud .ova fail.
Kui kasutate arvutiklassi arvutit, siis peale importimist tuleb seadistuste all valida 4 protsessorit (CPU) ja mälu 8192 MB.
Kui seadistused on tehtud, siis võib virtuaalmasina käivitada.
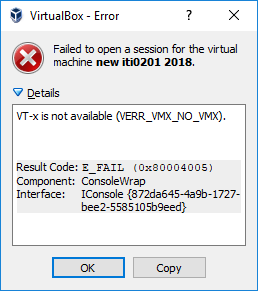
Kui näete sellist pilti, siis tuleb arvuti restartida ja valida käivitamisel "No Hyper-V" režiim.
Kui virtuaalmasin läheb küll näiliselt käima, aga ees on lihtsalt must ekraan, siis vaadake ega ei ole operatsioonisüsteemiks valitud "Ubuntu (32-bit)". Operatsioonisüsteem peab olema "Ubuntu (64-bit)". Lülitage virtuaalmasin välja ja vahetage operatsioonisüsteem 64-bitiseks.
Kui virtualiseerimine ei toimi enda arvutil, siis tõenäoliselt on see arvuti BIOS-is välja lülitatud. Virtualiseerimise lubamiseks tuleb minna BIOS-i seadistustesse ja sealt virtualiseerimine sisse lülitada. Kahjuks on igal arvutitootjal erinev viis kuidas BIOS-i seadistusmenüüsse ligi pääseda. Kui te kasutate Windows 10 või Windows 8, siis võite nt vaadata seda linki kuidas sinna ligi pääseda.
Mõistlikud otsingusõnad on "how to boot into bios" ja lisage oma arvutitootja ja/või mudel või seeria (nt "how to boot into bios ibm thinkpad").
Kui teil on UEFI boot, siis vaadake nt seda linki.
Virtuaalmasina kasutajanimi ja parool on mõlemad iti0201.
Terminali (käsurea) saab käivitada nupukombinatsiooniga Ctrl+Alt+T.
Kirjuta terminali käsk
robot_test [uni-id] [task-id] [world-id] [--noise] [--realmotors] [--debug] -x=[x] -y=[y] -Y=[Y]
[uni-id] asemele tuleb panna oma Uni-ID (nt karamb).
[task-id] asemele tuleb panna ülesande kood (nt simulaatori ülesanne on S).
[world-id] asemele tuleb panna maailma number (osadel ülesannetel on mitu testimismaailma), alates numbrist 1 (ja 2, 3 jne).
Võti --noise paneb kaugusanduritele müra.
Võti --realmotors paneb mootori kiirustele müra.
Võti --debug paneb simulatsiooni konsooli printima rataste tegelikke kiirusi koos müraga.
Roboti algasukoha saab määrata käsureal järgmiste võtmetega:
-x määrab x koordinaadi
-y määrab y koordinaadi
-Y määrab roboti nurga
Näiteks:
robot_test muudamind M4 1 -x=1.5 -y=1.5 -Y=1.57
robot_test muudamind S 1
Peale käsu käivitamist, tõmmatakse Gitlab-ist teie salvest lahendus ja pannakse see simulatsioonis käima.