New models#194
Conversation
There was a problem hiding this comment.
Someone else who knows what's "correct" should review this. I just took a brief look to steal the SDF file to test other models.
Coordinate frames look right - assuming all of them being Z up X forward is what we want.
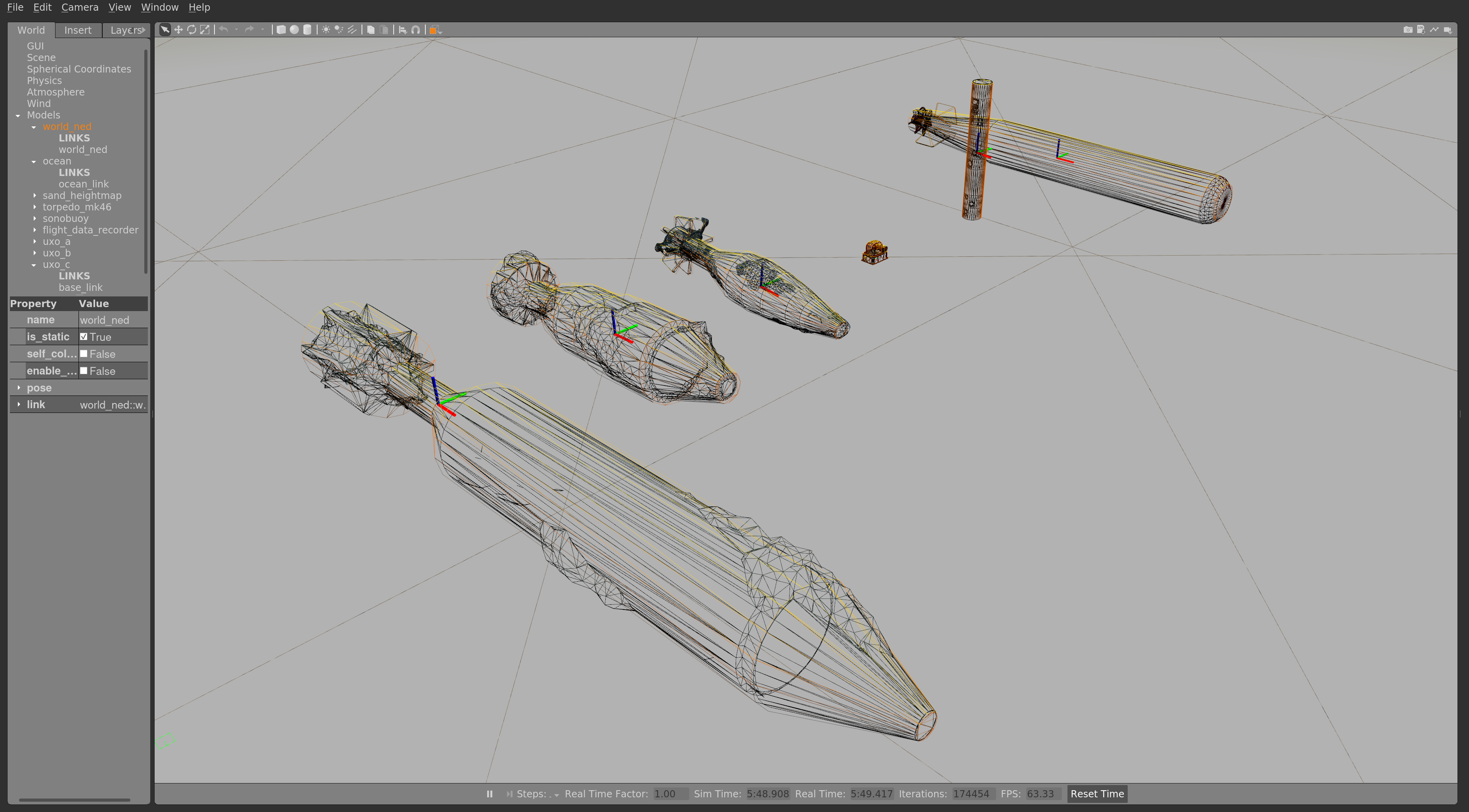
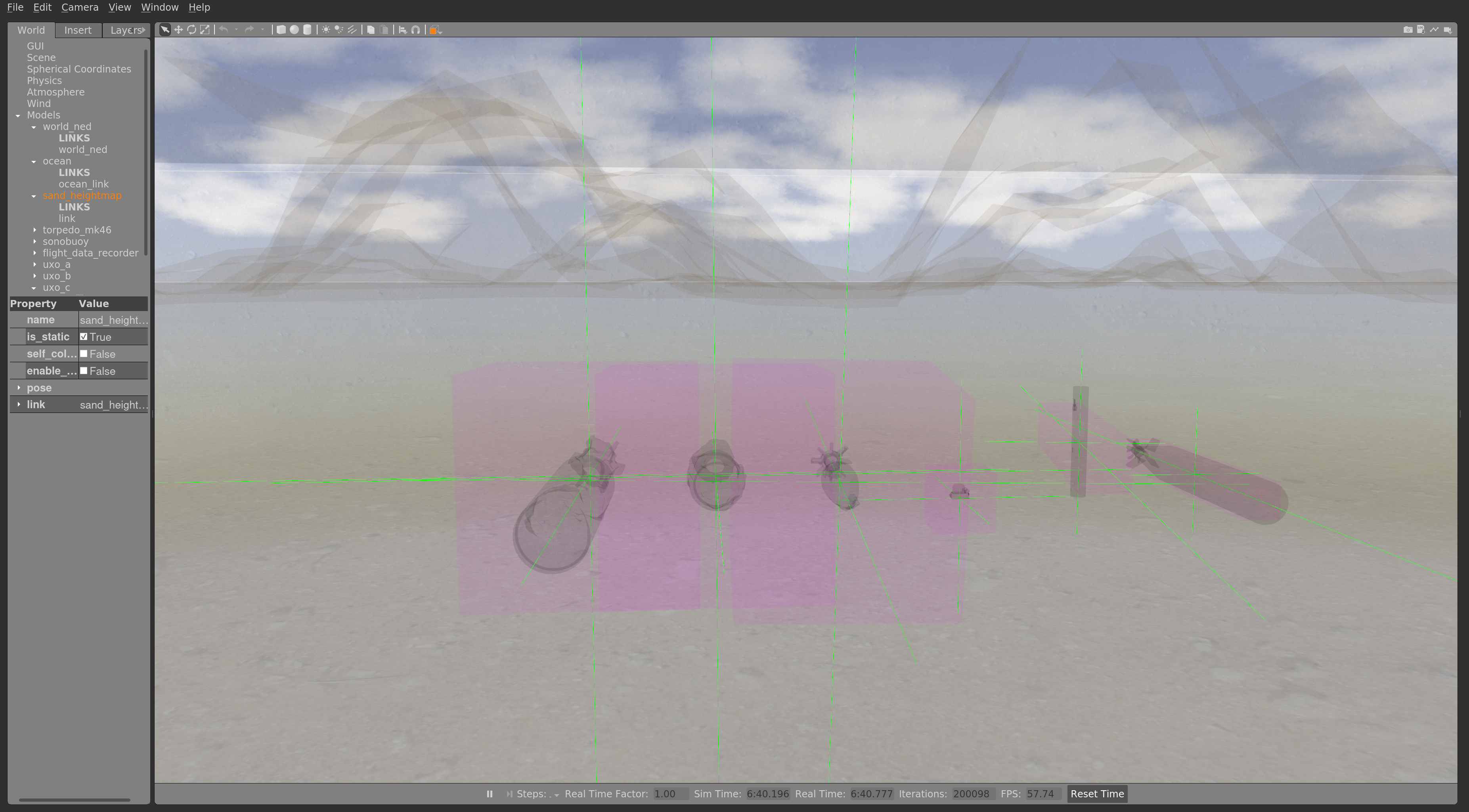
Inertia boxes look off. Do we care about that? If we are planning to use them for manipulation, that might not be negligible.
Side note, I see the light/dark shadow upstream bug now... Guess I have the dark version.
Also saw another upstream bug that if I enable skeleton view, then disable it, then enable inertia view, all the magenta boxes are opaque as opposed to translucent. Probably not an urgent thing to fix. FYI @WilliamLewww
|
@mabelzhang Good catch on the inertia values. I improved them. Still coarse estimates, but I think they should be sufficient for dave. |

|
Looks good. Did you intentionally skip |
 mabelzhang
left a comment
mabelzhang
left a comment
There was a problem hiding this comment.
Oh never mind, that one was already correct.
Thanks for adding them!
This PR adds three new object models (torpedo, flight-data-recorder, sonobuoy and three unexploded ordnance) along with a demonstration world.
Reviewer should be able to run the command
and view a minimal world with the three now models on the seafloor:
Please check that the link coordinate frames make sense and that the collision meshes are appropriate. I find it easiest to use the Gazebo gui to view this attributes.